Remote Teleop
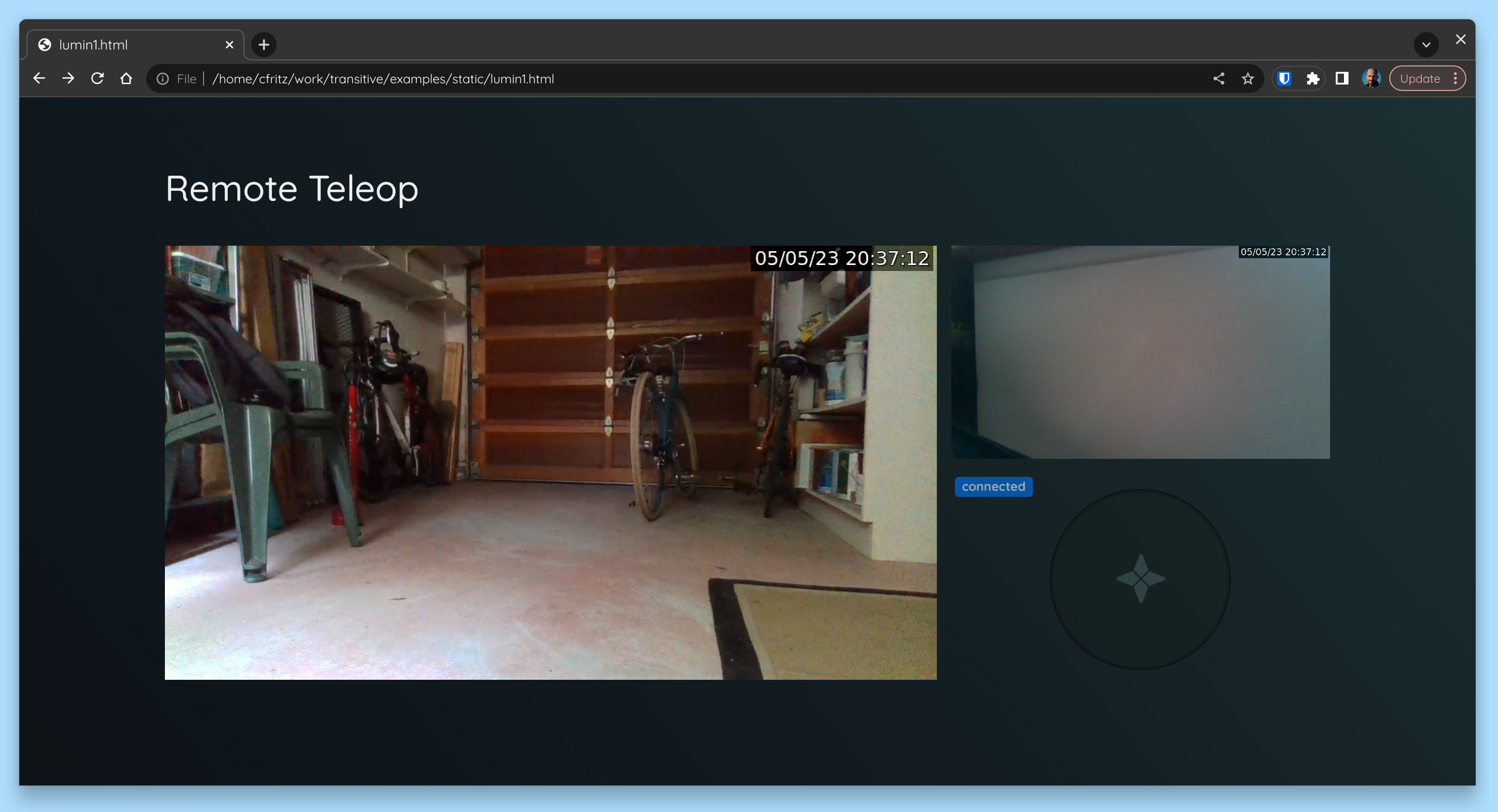
Reliable remote teleoperation (teleop) for your robots. This capability provides everything needed to control a robot remotely over the Internet. This includes tapping a variety of possible video sources on the robot (up to ten), establishing a direct peer-to-peer connection to the robot using WebRTC, even if the robot is behind a firewall, and a front-end UI component showing the video with super low latency.
For control, the capability supports publishing control messages received from the operators on ROS topics or to ZeroMQ, where we use the same topic names and message schema. Supports types geometry_msgs/Twist and sensor_msgs/Joy (resp. geometry_msgs/msg/Twist and sensor_msgs/msg/Joy in ROS 2). The video stream is provided by the WebRTC Video capability, more details on the supported video sources can be found there. Once installed, the device page on the Transitive Robotics Portal can be used to select available parameters and obtain an HTML snippet to embed the parameterized widget into other web applications.
The widget can be customized using CSS. In the default configuration the joystick is below the video, which makes it convenient to use as a soft-joystick when walking with the robot, but using CSS it can also be placed as an overlay on the video, e.g., in the lower left or right corner.
The web component supports receiving input from game controllers, e.g., XBox controllers, connected to the same machine where the web page with the front-end widget is open, either via USB or Bluetooth. This is particularly powerful when using Joy topics, as it transmits all the axes and buttons the controller has to offer. Combined with joy_teleop running on the robot, this enables the user to control multiple degrees of freedom of the robot, e.g., arms, forks of a fork-lift, and direction of a snow-blower. The buttons can be configured to turn things on and off on the robot such as mowers, snow-blowers, or lights. See below for an example config for joy_teleop.
Disclaimer
Please be aware of the dangers of remotely controlling a robot. By using this capability you assume complete responsibility for the safe operation of the robot you are controlling using this capability and accept and agree to our Terms of Service.
Features
- Video: all features of WebRTC Video capability, incl.
- ultra low latency
- Only adds around 30 ms + network latency (ping timing) compared to direct camera-to-screen display
- stream up to 10 cameras simultaneously
- support many different kinds of video sources, e.g., USB/GigE/IP cameras, and ROS/ROS2 image topics, etc.
- hardware acceleration
- efficient h264 video compression
- no need for a VPN
- ultra low latency
- Controls:
- Supports ROS 1, ROS 2, and ZeroMQ; custom APIs on request
- Supports both
TwistandJoytopics (equivalent JSON published on ZeroMQ) - On-screen soft-joystick
- 🎮 Gamepad/Joystick support
- including multiple simultaneous controllers (up to four)
- Click-events published on robot from clicking on video
- useful for implementing tele-assist workflows
- Operator audio: send audio from operator microphone to robot speakers.
- Requires
gstreamer1.0-pulseaudioto be installed on robot on older versions of Ubuntu.
- Requires
Safety Features
- uses the same connection for video and control, preventing control without working video
- dead-person switch: only sends movement commands when user actively drags the joystick. Stops when:
- network drops
- client-side disruptions occur (e.g., a popup appears)
- stops sending commands when connection lag increases beyond 500 ms.
- explicit activation:
- user needs to explicitly enable controls (on-screen joystick + gamepad) before use
- can be disabled by setting
alwayson="true"in the HTML attributes.
- Stamped ROS messages (
JoyandPointStamped) are timestamped with the robot-time of the last video frame received by the web front-end. If this is more than 500ms old, the ROS message will not be sent. This also accounts for potential delays receiving the control signal from the front-end.
Dependencies
Please see the Dependencies for WebRTC Video, the capability this one is based on.
Example using ZeroMQ
Run pip install pyzmq, then run this in python:
Start a remote-teleop session using the /joy topic for publishing joystick commands, move the on-screen (or connected gamepad) joystick, and you should see output like this (minus the pretty-printing) on the console of the python script:
Testing with ROS
One very easy way to test this capability is using turtlesim (ros2 run turtlesim turtlesim_node) together with joy_teleop using the following config.yml, which seems to work well for Xbox controllers. This uses Button LB as dead-person switch, and the A button clears:
Configuration
See Video Configuration.
Controls
Gamepads
The capability supports game controllers connected to the computer where the front-end component is rendered in a browser. This includes Xbox and PS4/PS5 controllers, pedals, wsteering wheels, and multi-button joysticks. When the /joy topic is used, all axes and buttons of the "standard mapping" are used. When the /cmd_vel topic is used, only the left joystick is used since Twist messages only have two axes: angular velocity and linear velocity.
When using ZeroMQ, we use the same topic names and message formats (as JSON).
On-screen Controls
Depending on the topic type used, the front-end will render different on-screen controls (soft-joystick). When a Twist topic is used, there is only one joystick. When a Joy topic is used, there are two joysticks plus a number of buttons. In addition, when the on-screen controls are used, the front left top button is pressed to allow its use as a dead-man switch (see the testing example above).
In both cases, when a gamepad is connected, the on-screen controls are disabled but will reflect the state of the gamepad controls.
Click Events
When the user clicks on the video image, a ROS message will be published to /transitive/remote_teleop/click in any initialized ROS versions (1 and/or 2). The topic has type geometry_msgs/Point, with:
xbeing the relative x-offset on the video (left = 0, right = 1.0), andybeing the relative y-offset on the video (top = 0, bottom = 1.0).
These ROS messages can be used to implement various interaction modalities on the robot, e.g., projecting the clicked point into map-coordinates and commanding the robot to navigate there.
Local Mode
When running in a self-hosted deployment offline, i.e., not connected to the Internet, the two WebRTC peers, robot + web user, can now discover each other via a new, locally hosted STUN server included in the cloud capability. This is used automatically when the robot is unable to reach the default TURN server hosted by us. This means you can now use Remote Teleop in local networks that are not connected to the Internet. Note, however, that your server still needs to go online every few days to receive an updated billing token for your robots' capabilities.
Changelog
v0.20
- Adds support for controlling robotic arms
- please contact us for details and help setting this up
- Adds the
dynamic_bitrateprop, to dynamically change bitrate during a session
v0.19
- Adds support for Ubuntu 26 (not yet including support for ROS Lyrical).
v0.19.5
- Improves congestion control in the context of packet loss
v0.18
- Removes the requirement for ROS and adds support for zeroMQ (for publishing control commands to your own processes running on the robot).
v0.17
- Uses a persistent ROS node for publishing session feedback (lag, bitrate, etc.) to ROS (1 and 2). This simplifies the setup and avoids issues when subscribers do not connect to new publishers reliably in ROS. The feedback JSON message now includes the
sessionId.
v0.16
- ROS control messages are now timestamped based on the last video frame received by the front-end when the control was sent (all times based on robot's clock, no clock synchronization required).
- New parameter
control_rate: set frequency (Hz) of control messages from front-end (default: 20, min 10, max 100)
v0.16.4
- Fixes a bug in lag-detection when receiving audio
v0.16.5
- New parameter
frame_ids: a comma separated list offrame_ids to use for the attached gamepads when publishing/joymessages. For example:frame_ids="left,right". The index corresponds to the index of the gamepad in the browser. - Fixes an issue where using audio together with certain sources (e.g., ROS topics) could lead to poor congestion control performance, leading to poor image quality.
v0.16.6
- Fixes a race condition re. the use of
frame_idsfor gamepads
v0.16.7
- Improves peer-to-peer connection negotiation on unreliable networks
v0.16.8 & v0.16.9
- Fixes and issue with Safari when streaming from devices with VA-API hardware acceleration
v0.16.10
- Fixes an issue on older versions of NVIDIA Jetpack when using compressed ROS topics
v0.15
- For ROS2, uses newer version of rclnodejs with pre-built binaries on Humble+
v0.14
- Adds support for pipewire video devices (default in Ubuntu 24.04+).
- Adds partial support for UVC H264 devices (Ubuntu 24+).
- Now shows display names for video devices in UI.
- Clicking on video streams of ROS topics now publishes events using the same
frame_idas the original ROS topic. For non-ROS sources it remains a genericframe_idusing the index of the stream.
v0.14.3
- Fixes a bug in the packet loss mitigation logic of Ubuntu 22+.
v0.14.4
- Fixes a bug that prevented using more than six streams.
- Fixes a bug in the auto-bitrate logic that resulted in a rate that was too low when using multiple streams.
v0.14.5
- Fixes an issue where gamepads are not detected after a reactive component rerendering (e.g., in React).
v0.13
- Adds support for multiple gamepad/joystick controllers (up to four). Each one will publish with its own
frame_idin the ROS header.
v0.13.2
- Adds new per-stream option
prioritythat allows you to set the relative priority of that stream for allocating available bandwidth (default = 1). - Video-click events are now published also as
PointStamped(onclick_stamped) including aframe_idindicating which stream was clicked (zero-indexed), e.g.,video2for the third stream.
v0.12.0
- Sets
frame_idin published Joy ROS messages to indicate on-screen controller or gamepad Id being used. This allows you to apply different mappings from input to motor commands on your robot depending on the controller the inputs come from.
v0.12.1
- Adds new parameters
blacklist_netmaskandwhitelist_netmaskthat let you black list (resp. white list) robot-side netmasks to use for establishing the WebRTC peer-to-peer connection. This can be useful, e.g., to prevent the use of VPN interfaces (e.g.,blacklist_netmask: '10.0.0.0/8').
v0.12.2
- Fixes a bug in the blacklist logic for
hostcandidates - Adds ability to specify multiple, comma-separated netmasks
v0.12.4
- Upgraded to React 18, warn about expired JWT
v0.12.5
- Adds a new prop
invertedthat, whentrue, will cause all axis values to be inverted. This is useful, for example, when showing a user the feed of the backward facing camera of a robot.
v0.12.7
- Uses hardware acceleration on NVIDIA platforms when available for decoding compressed ROS images (jpeg).
v0.12.8
- Fixes a bug in the reconnect logic that caused the old, stale video stream to continue being shown
v0.12.11
- Adds a new
feedbackROS topic where the full lag/connection feedback from live sessions will be published as JSON, including a newnamefield that can be setting via an embedding parameter. This allows you to distinguish lag feedback by session. Since the field is just a string you can also use this to provide other information about the ongoing sessions back to the robot.
v0.12.12
- Allow setting framerate for ROS topic sources e.g.,
framerate="30/1". - Show per-track FPS in status badge tooltip.
v0.11.0
- Adds new "local mode".
v0.11.2
- Fixes a bug in supervisor auto mode, where old sessions were not replaced or removed when new ones started.
v0.11.3
- Adds support for the two trigger-axes on XBox controllers, LT and RT (in addition to mapping them to binary buttons, for consistency with PS4 controllers).
- Adds support for ROS Jazzy.
v0.11.4
- Add support for "standard" mapping of XBox controllers: Buttons 6 and 7 send float
values(not just binarypressed), which we map to axes.
v0.11.5
- Unified handling of PS4 and XBox controllers that comply with "standard" mapping.
v0.11.7
- Show button to reset timeout in 2 minutes before timeout ends.
v0.11.8
- Fixes an issue with some compressed ROS image topic sources
v0.10.0
- Adds the supervisor UI component from webrtc-video.
v0.9.0 (big!)
- Added bandwidth optimization.
- This saves bandwidth when the scene in the video is mostly static by using variable bitrate encoding. When using the "high" setting for this, it can reduce bandwidth to as low as 5KB/s.
- Reduced latency to around 100ms.
- Increased robustness:
- Better error handling and reporting when sessions fail.
- Eliminated more cases where a request could get "stuck", blocking future sessions using the same parameters.
- Reduced delay in starting the stream in the face of packet loss when using NVIDIA hardware encoders.
-
v0.9.1:
- Add quantizer setting (bandwidth optimization) to config provided in Embed.
- Correctly set bitrate, peak-bitrate, and/or maxbitrate on NVIDIA jetson devices.
-
v0.9.2:
- Ease-of-use: update video sources on page load and right away when a session ends, to update busy status of v4l2 devices.
- New feature: auto-bitrate mode. This allows you to leave the bitrate unspecified, letting the capability decide automatically what an appropriate bitrate is given the video sources you selected. This, together with the new bandwidth optimization feature, makes it extremely easy to get good quality streams without any tuning.
-
v0.9.3:
- Multi-touch support: you can now use both on-screen axes at the same time, e.g., for landscape layouts on an iPad with one axes in each bottom corner of the screen.
-
v0.9.4:
- Safety: Detect stale video sources (not just lag) and disable controls.
- Ease-of-use: Automatically recover from busy USB cameras and timeouts receiving ROS messages.
- Ease-of-use: Always send control commands while a button is pressed (not just on press/release).
- Namespace ROS 2 nodes in
/transitive.
-
v0.9.5:
- Fixes a race condition with ROS topics on NVIDIA hardware encoders (VIC only, dGPU was not affected).
-
v0.9.8:
- Fixes a bug in one of the safety mechanisms that affected iOS devices (enabled the safety lock out all the time due to "old frames").
-
v0.9.10:
- Fixes a bug when doing local recording of ROS topic sources
- Sets the default MTU to 1,200, adds new parameter
rtpMtuto overwrite this
-
v0.9.11:
- The robot-side now publishes current lag and bps (bitrate) to ROS.
v0.8.0
- Improves CPU efficiency of h264 encoding by 3x when using software encoder.
- Adds ability to customize test-image resolution and framerate.
v0.6
- Based on webrtc-video 0.17: improved congestion control.
v0.5
- Added video-click events.
- On-screen controls now show state of gamepad.
- When using a Joy topic, the on-screen controls now include two joysticks and eight buttons, arranged like a PS4 controller.
- Added feature to require user to enable controls explicitly before being able to use them (this also applies to any attached gamepad).
-
v0.5.5:
- Fixes an issue regarding the installation of ROS 2 bindings.
Details