Frequently Asked Questions
- Is Transitive yet another Fleet Management System?
- Is Transitive a replacement for ROS?
- How does Transitive relate to Open-RMF?
- How does Transitive's data-sync differ from ROSbridge?
- Does Transitive require ROS?
- We have tight security requirements for our robots, can we still use Transitive?
- We have some very specific needs, can we hire you for custom work?
- Are all capabilities offered through Transitive made by Transitive Robotics?
Is Transitive yet another Fleet Management System?
No. Transitive is several things but not a fleet management system. We believe that our customers (robotics companies) need to build their own cloud portals for fleet management. We just want to help them do this more efficiently and achieve a higher degree of quality. We do this in two ways: by providing an open-source framework that solves many of the hard problems faced when building such a system, and secondly by offering a number of commercially supported capabilities that can be plugged into any existing cloud portal, whether it was built using Transitive or not. These capabilities provide functionality commonly needed for operating fleet of robots or for showing real-time information and dashboards to third parties, e.g., our users' customers.
Is Transitive a replacement for ROS?
Not at all! We think ROS is the best robotics middleware out there and we contribute to it. Conceptually it is better to think of Transitive as extending ROS into the cloud. ROS is great for all sorts of robotics needs on the robot itself, but it doesn't provide any reasonable mechanisms for connecting the robot to the cloud and web-based UIs.
While Transitive doesn't require ROS, many of the capabilities we have built and we encourage you to build use ROS. In those cases, the robot component of the capability is a ROS node. The Health Monitoring capability is a good example of that.
How does Transitive relate to Open-RMF?
Both Open-RMF and Transitive are focused on connecting, monitoring, and managing multiple-robots. However their focus is very different. Where Open-RMF is primarily focused on coordinating robots operating in the same space to avoid collisions and deadlocks, and increasing interoperability between robots from different vendors, Transitive is focused on full-stack capabilities, i.e., functionality that combines code running on the robot, the cloud, and the web. As such it is better suited for creating operational tools and application level UIs. As such, Open-RMF and Transitive complement each other very well and the Open-RMF team and us have explored ways to work together.
How does Transitive's data-sync differ from ROSbridge?
ROSbridge provides a way to connect to a ROS system via websockets and TCP. This is enabled by bridging ROS topics and services to JSON. As such, web UIs built using rosbridge connect to individual robots directly and receive their information directly from them. This is a problem in practice since robots typically have very spotty network connections, and are often offline for extended periods. This really handicaps the user-experience as those web UIs will often be unavailable and means that users need to check back later when the robot might be reachable again. It also requires user and robot to be on the same network and for the robot to allow in-bound connections.
In contrast Transitive synchronizes and stores all pertinent data to and on the cloud and all UIs receive their data from there. This means that UIs built with Transitive are always available and always showing the latest available data, even when the corresponding robot is offline.
Transitive's MQTTSync further de-duplicates ROS message data, such that only changed field values are transmitted, rather then every new message that is published on a subscribed topic, irrespective of whether or how much it has changed. This greatly reduces network traffic to the Internet which saves money when robots are on 5g/cellular and increases resilience.
Does Transitive require ROS?
No. Transitive is completely independent from ROS and could as well be used in applications outside of robotics. Several of the capabilities we provide support ROS or are even targeted at ROS specifically, e.g., ROS Tool, obviously. But most of them, in particular our webrtc-based capabilities for video-streaming and teleoperation/tele-assist, can be used without ROS.
We have tight security requirements for our robots, can we still use Transitive?
The easiest way to meet tight security requirements, such as for SOC-2 or FedRAMP, is to self-host Transitive on your own cloud or on-prem infrastructure. Please reach out if you need help with that.
We have some very specific needs, can we hire you for custom work?
Yes. We offer service contracts, billed by the hour, to do anything from setting up Transitive on your fleet, embedding Transitive UI components in your dashboards, helping you build your own dashboard, developing custom capabilities, or setting up Transitive on your own infrastructure. Please contact us if you have questions.
Are all capabilities offered through Transitive made by Transitive Robotics?
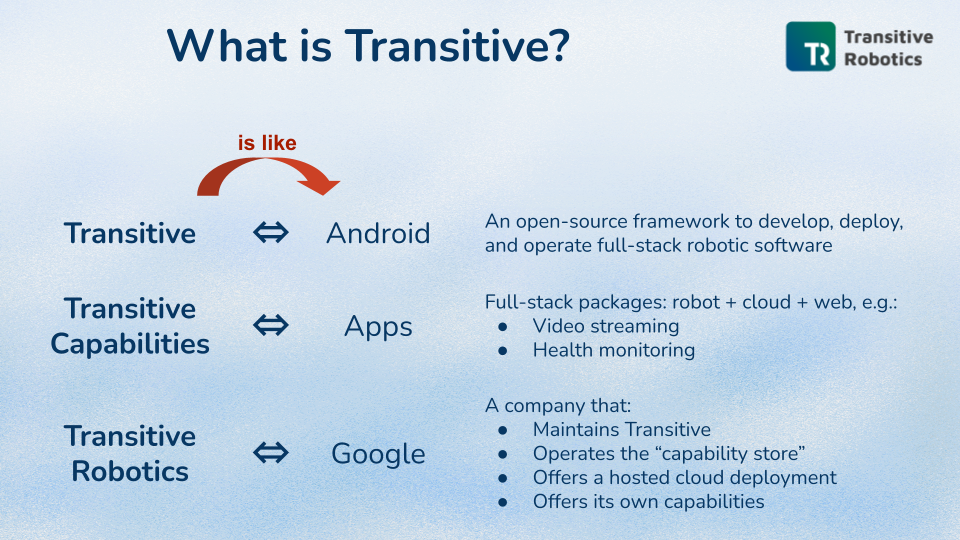
For the most part, but not all. Transitive is like Android, an open-source framework for developing new capabilities, and the "capability store" is analogous to Google's app store: