Announcing transAct: An open-source robot fleet management dashboard template
We are excited to announce transAct, an open-source dashboard template for robot fleet management!
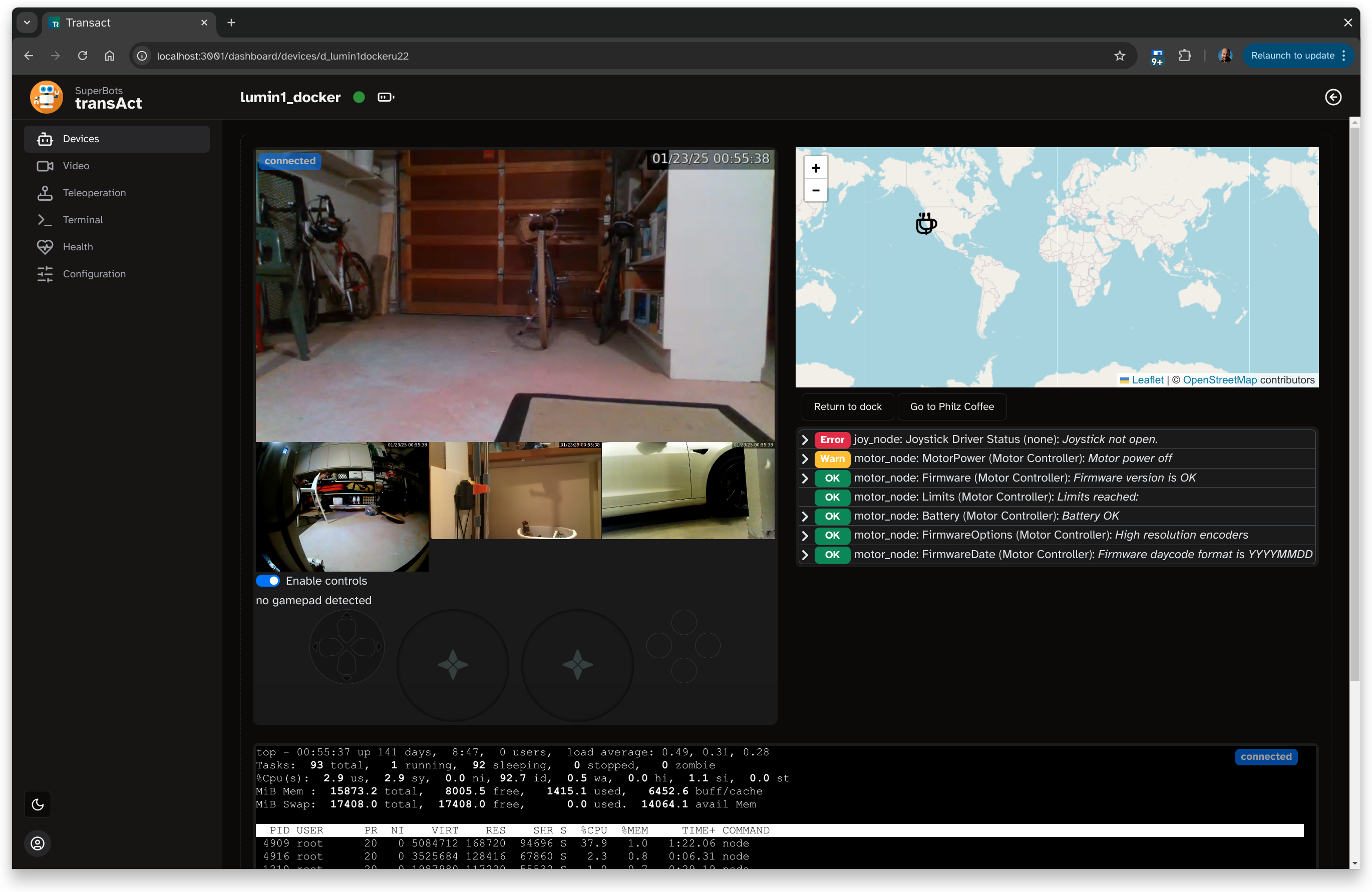
Device page incl. live video, remote control, map, ROS diagnostics, and a terminal.
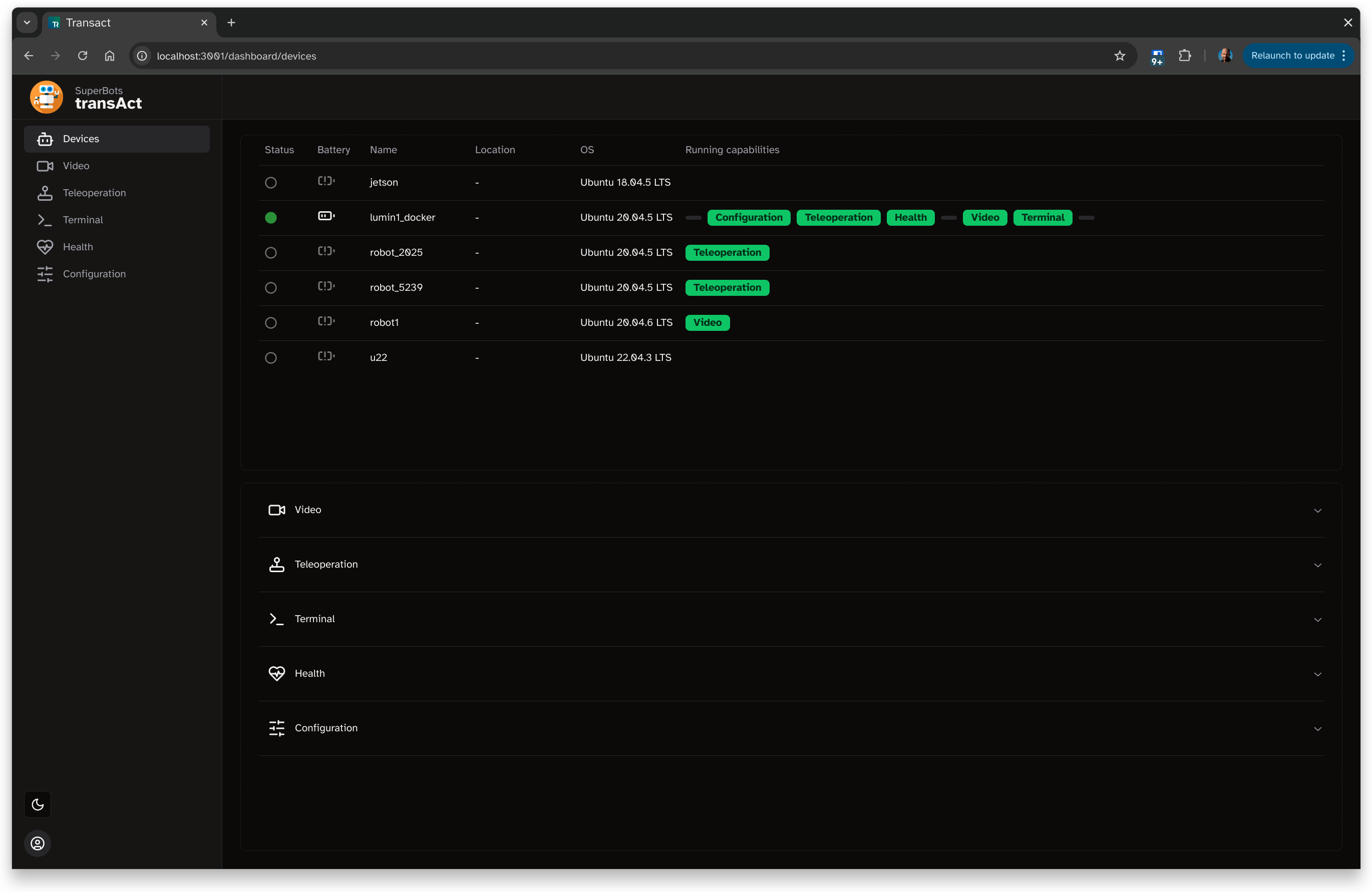
Devices page, listing all robots in the fleet and their installed capabilities.
Why We Built It
Robotics companies with fleets of more than a handful of robots need web dashboards to monitor and operate their fleets. They enable non-engineers to monitor, triage and sometimes fix issues in the field, which is required for operational efficiency and to free engineers from daily interruptions. This is particularly important with a RaaS business model. But who builds these dashboards? Engineers are already spread thin due to the large number of aspects of robotics they need to attend to (hardware, firmware, drivers, robotics stack, cloud, web) so building their own web dashboards from scratch is challenging, especially since the skills required for web development are quite different from the rest of the robotics software stack.
At Transitive Robotics we see it as our mission to enable robotics companies to build their own fleet management systems quickly and easily. We've already developed a number of capabilities like webrtc video streaming and remote teleop that robotics companies can install on their robots and integrate into their own dashboards. But many companies, especially smaller ones, don't yet have web dashboards for fleet management of their own. This is why we created transAct.
Purpose
TransAct serves multiple purposes:
- provide a starting template for companies to build their own fleet management dashboards,
- serve as a reference implementation showing how to integrate Transitive capabilities into such dashboard, and
- show how you can use the ROS Tool React API to interact with ROS directly from the web (while avoiding the shortcomings of rosbridge + roslibjs) and the Transitive SDK to get full programmatic access to all the data provided by these capabilities.
Current Features
In the current version transAct already embeds several capabilities:
- Remote Teleop, to control your robots with low-latency video from anywhere in the world,
- Terminal, for web-based shell access to your robots without the need for a VPN,
- ROS Tool, for subscribing to ROS topics from the web, used to show robot pose, battery, and charging status in our example, and make ROS service calls,
- Configuration Management, for editing config files on your fleet hierarchically (with fleet defaults and robot specific overwrites), and
- Health Monitoring, for monitoring device diagnostics and aggregated fleet diagnostics.
We invite you to fork transAct and extend it to meet your needs and we'd love to hear your feedback and questions on our Slack community.