Missions
Define and schedule missions from the web, have them executed on robots, and track their results back on the web.
Features
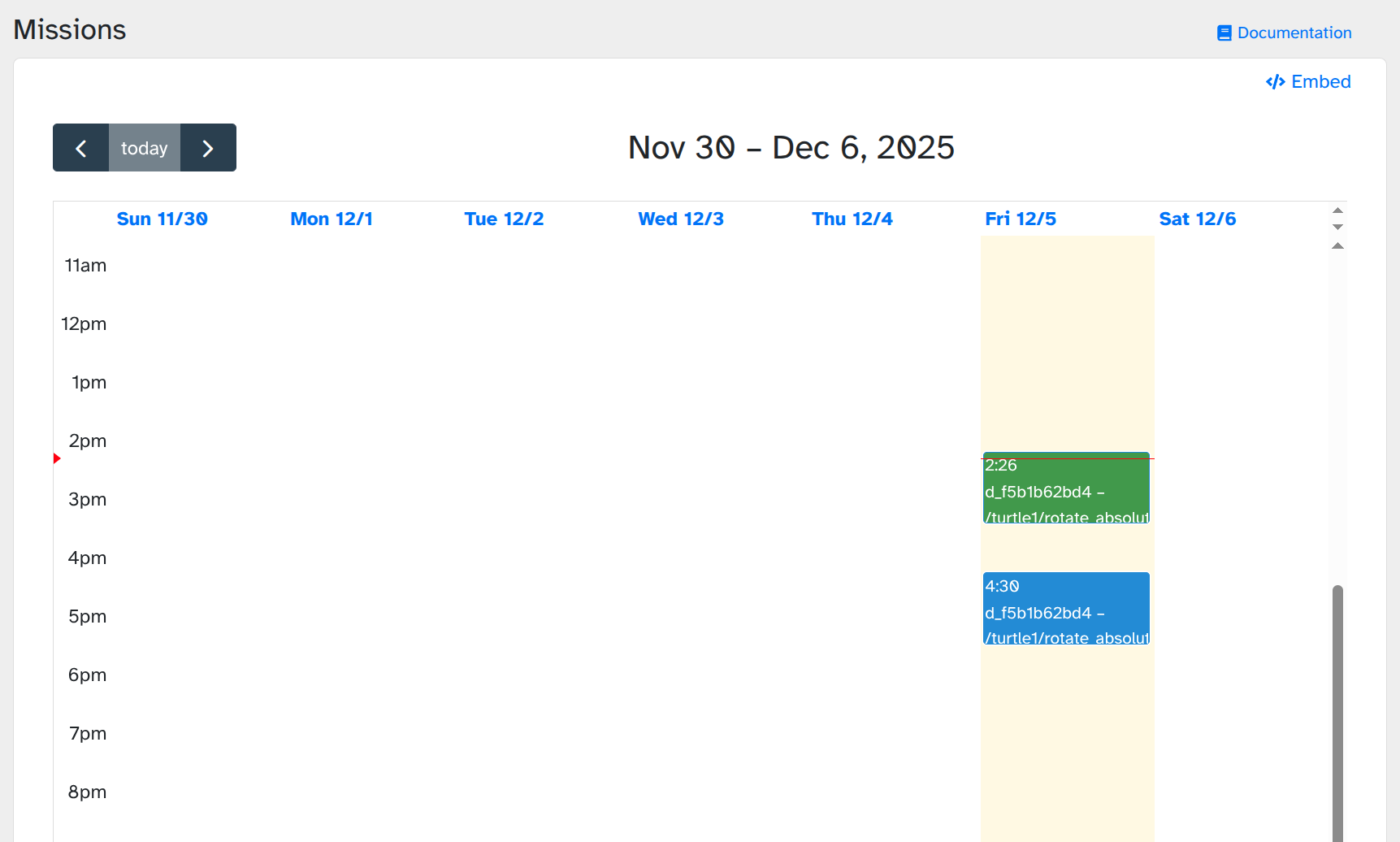
- Calendar for defining and scheduling missions
- incl. recurring events
- Scheduled execution on the robot
- Termination status reported back on the calendar interface
- coloring finished events based on exit status
- Mission defined as ROS actions with request parameters
Planned road-map
- Allow more complex missions:
- Behavior Trees
- Arbitrary programs
- Show missions result (not just status)
- Show live feedback during execution
- Separate table showing mission history
Details
Publisher: transitive-robotics
v0.1.1, published 12/9/2025, 1:17:11 AM
Free